Integrated Communications,
Navigation & Control
Robot Framework
Thesis infographic presentation
Thesis infographic presentation
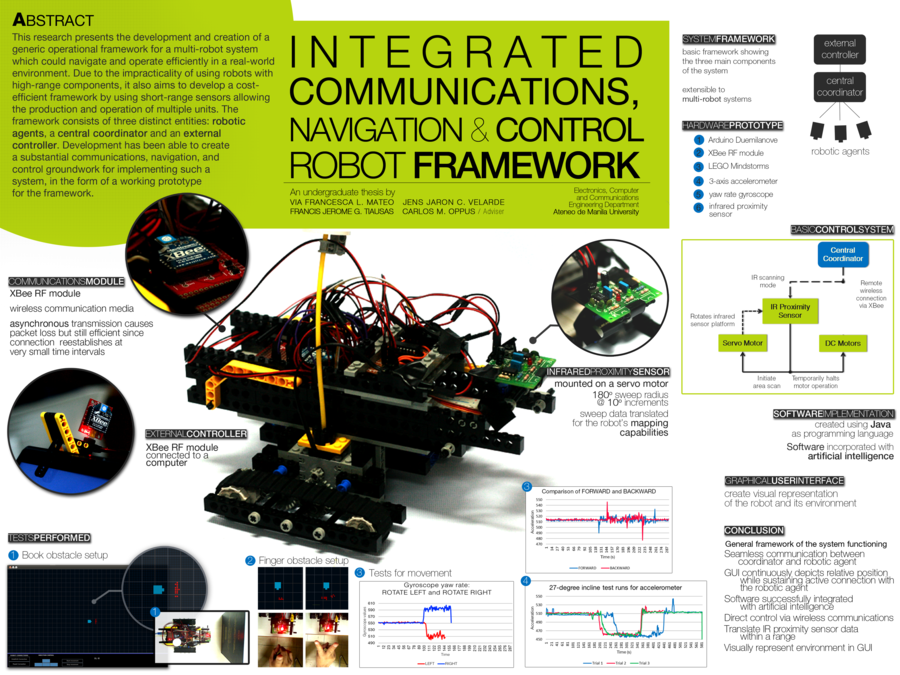
What we did for our thesis was to create an adaptable and robust framework extensible to multi-robot systems. In case you're asking what it does, we made it map out things it can detect as obstacles. I made a GUI written in Java which can control the robot in a nearby or remote computer. The robot detects things using this IR proximity sensor, just a cheap low-range sensor -- taking things little by little as we were just starting out. The robot communicates with the controller via a remote wireless connection. One feature we haven't really thought of, thanks to our brilliant adviser, he told us to try it out as a robot with night vision --- since it's an IR sensor it can work anywhere even without light, the controller can see its movement in a GUI anyway.
Think of playing games like Command & Conquer and Starcraft with maps that are initially pitch black. As you explore the environment by clicking at different points in the map, the robot maps out the obstacles so you know places to avoid. If it detects an obstacle along the way, it searches for a route without an obstacle...not necessarily the shortest, though.
For the complete features of this project, I've created an infographic below for our presentation.
Think of playing games like Command & Conquer and Starcraft with maps that are initially pitch black. As you explore the environment by clicking at different points in the map, the robot maps out the obstacles so you know places to avoid. If it detects an obstacle along the way, it searches for a route without an obstacle...not necessarily the shortest, though.
For the complete features of this project, I've created an infographic below for our presentation.
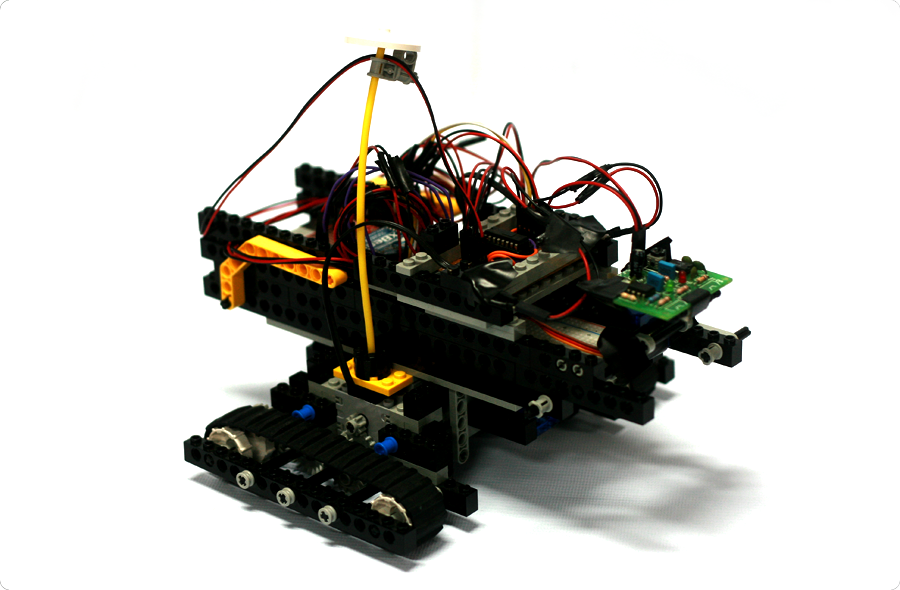
Front view of the robot prototype. Our team used parts from the Lego Mindstorms to create the body.
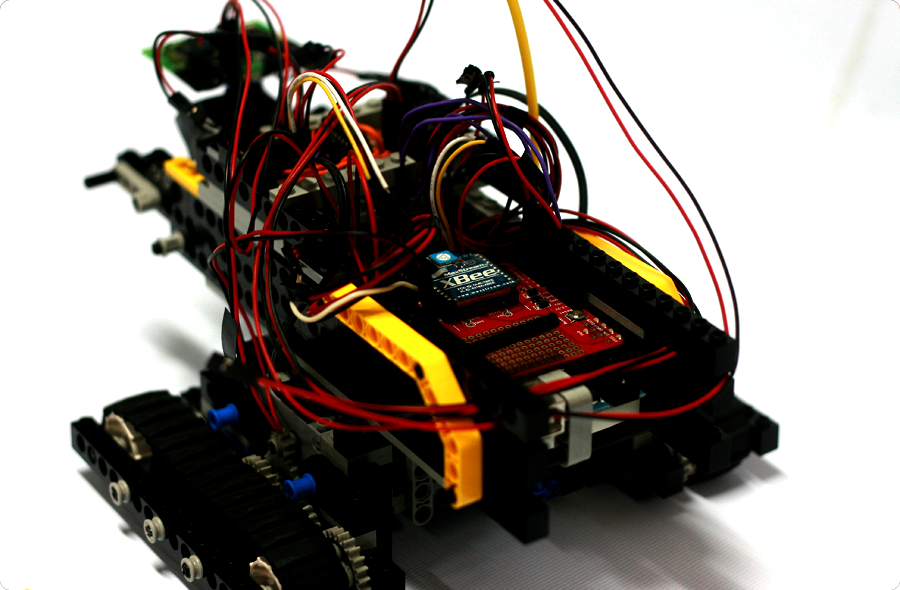
Rear view. Seen here at the back of the prototype is the XBee used for communicating with the controller/computer.
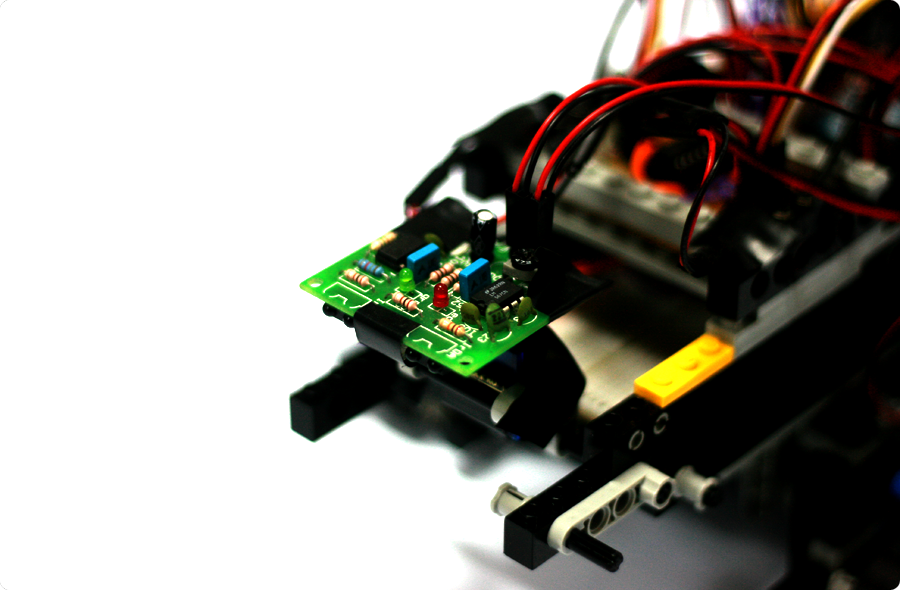
Eye of the robot. This is a proximity sensor that rotates at a 120-degree sweeping angle and detects obstacles to be mapped out in the software we created.
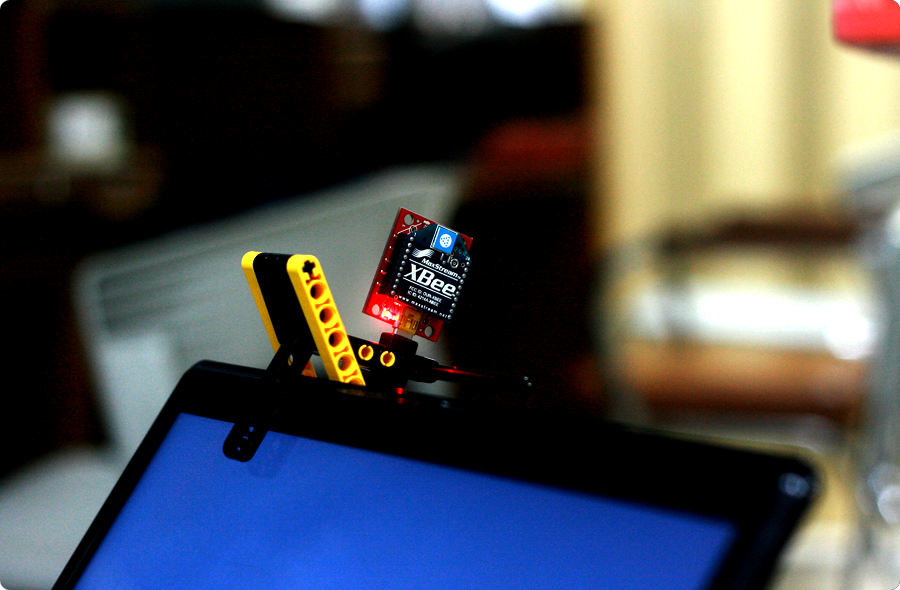
The XBee module connected to the controlling computer. This creates the communication link between the robot prototype and the human controller.
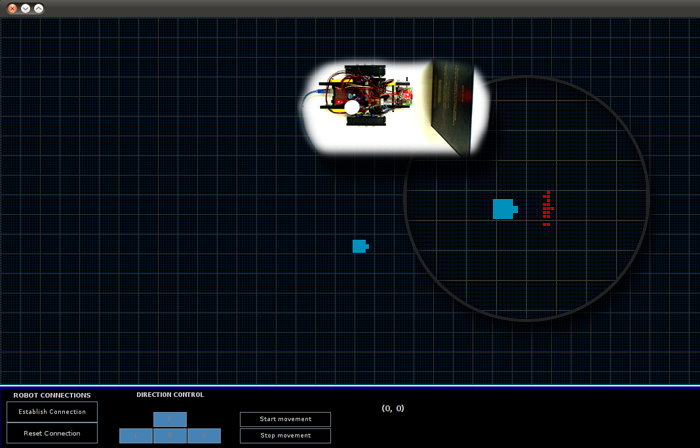
A sample of the map created by the robot. The blue object represents the robot. The red dots represent the obstacle which, in this case, was a book just in front of the robot. The black panel below can be used to control the robot to start and stop moving, to move in different directions and to establish/restart the connection between the computer and the robot. The user can also click on the GUI/screen and the robot prototype will go to the direction the user indicated. At the same time, the robot maps out obstacles along the way and moves to the shortest route w/o obstacles to go to the point the user indicated in the GUI.
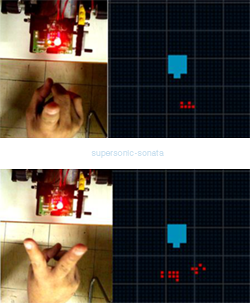
Another sample of how the robot maps out obstacles and how it is interpreted in the software/GUI.

