
Parts for the arm are printed in ABS black. All moving joints have 8mm bearings, fasteners are m3, servos are hd1501mg analog. Arm is 4 DOF based on a parallel frame mechanism.

Showing partial assembly. Some parts were printed in white/natural ABS

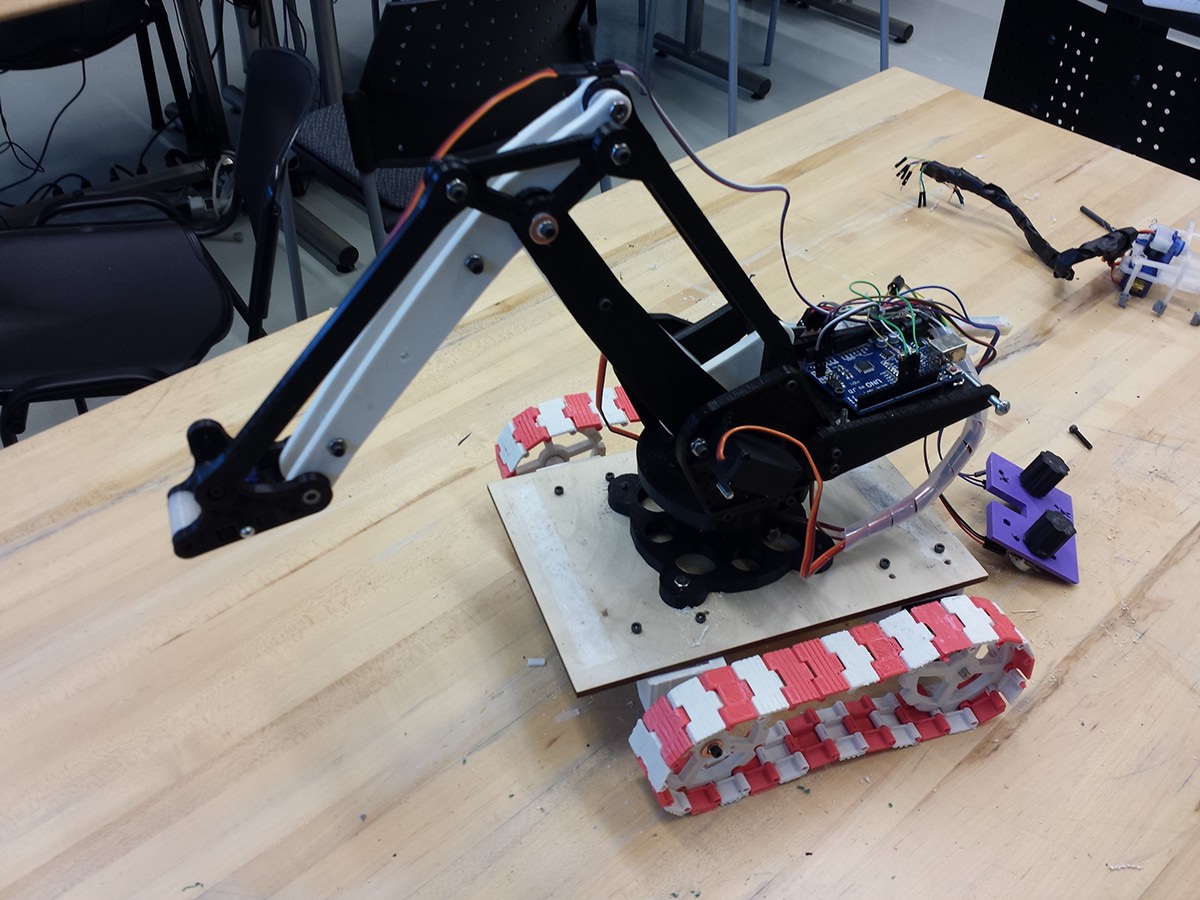
Partially assembled, testing code to reset the servos to center position before installing all the parts. I decided to add tank tracks and stepper motors to make this robot more mobile. This was a very low cost implementation I would recommend to others looking to make a tank robot. The purple controller has 2 potentiometers wired to analog pins on the arduino board that control the shoulder and forearm servos on the arm. After adding more servos for an end effector, I decided to change to a different board layout with a stepper shield.



End effector is printed in yellow ABS and made of 19 parts. The gripper can rotate as well as open/close and holds up to 200g.



Stepper control shield I picked up online. I power this with a 9v battery. An additional arduino connecting all 5 servos is connected to a Bluetooth relay module under the wood chassis. The rover is controlled via an Android bluetooth joystick app. I get around 10 minutes of battery life at a time, looking for a better solution with li-po packages.


Still to do: cable harness, control optimization, tread padding, better batteries
Special thanks to McMaster for the 3D printers
Special thanks to McMaster for the 3D printers




